
4/8.Соединение с обратной связью. В предыдущем параграфе Р соединялось с R так, что изменения Р некоторым образом влияли на изменения R или определяли их, но изменения Р не зависели от того, в каком состоянии было R. Однако две машины можно соединить и так, чтобы обе они воздействовали друг на друга.
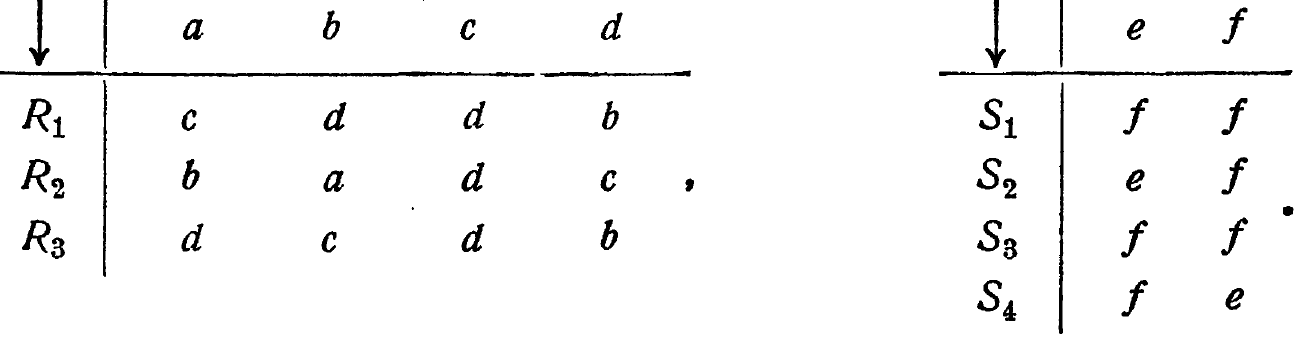
Для этого каждая машина должна иметь вход, т. е. параметры. Машина Р не имеет параметров, и, следовательно, такое двойное соединение непосредственно не осуществимо для машин предыдущего параграфа. Поэтому предположим, что мы собираемся соединить машину R (такую же, как выше) с машиной S, заданной ниже:
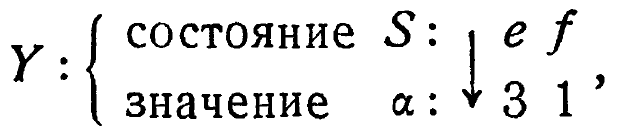
Пусть S при соединении воздействует на R согласно соотношению Y (где ![]() есть параметр машины R):
есть параметр машины R):
a R воздействует на S согласно соотношению X (где ![]() есть параметр машины S):
есть параметр машины S):

Чтобы проследить изменения, испытываемые всей этой новой машиной (назовем ее Т), предположим, что она начинает работу с состояния-вектора (а, е). Согласно соотношениям Y и X, преобразования, применяемые на первом шаге, суть  и
и ![]() . Действуя соответственно на а и е, они дадут d и f; таким образом, новое состояние всей машины Т будет (d,f). Следующие два преобразования будут
. Действуя соответственно на а и е, они дадут d и f; таким образом, новое состояние всей машины Т будет (d,f). Следующие два преобразования будут ![]() и
и ![]() , и потому машина Т перейдет в состояние (b, f) и т. д.
, и потому машина Т перейдет в состояние (b, f) и т. д.
Упр 1. Постройте кинематический график Т.
Упр. 2. Соедините S и R каким-либо другим способом.
Упр. 3. Соедините S и R так, чтобы S воздействовало на R, но R не воздействовало на S. (Указание: рассмотрите, каков будет результат, если в X все значения сделать одинаковыми )