
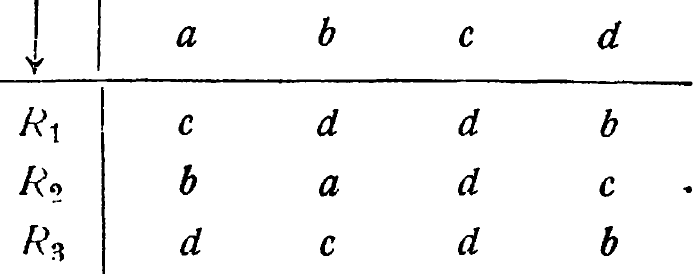
4/7. Проследим теперь операцию соединения подробно. Предположим, что машину (преобразователь) Р требуется соединить с другой машиной R. Пусть для простоты машины Р должна действовать на R, не .вызывая обратного действия R на Р; примером может послужить соединение микрофона с усилителем или прорастание двигательного нерва для иннервации эмбриональной мышцы. Мы должны соединить выход из Р со входом в R. Очевидно, что поведение R, или, точнее, преобразование, описывающее изменение состояний R, будет за-висеть от состояния Р и изменяться вместе с ним. Отсюда следует, что машина R должна иметь параметры в качестве входа и что значения этих параметров в каждый момент должны быть некоторой функцией состояния Р. Положим для определенности, что машина,или преобразователь, R имеет три преобразования, перечисленные в ![]() 4/1, т. е.
4/1, т. е.
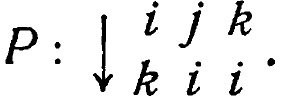
Положим также, что Р имеет преобразование для трех
состояний i, j, k:
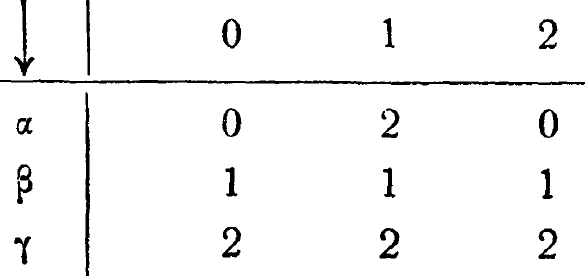
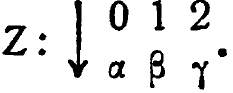
Мы должны теперь соединить машины Р и R, указав,какое значение должен принимать параметр машины R (назовем его а), когда Р находится в любом из своих состояний. Положим, что мы связали их соотношением Z (однозначным, но не замкнутым преобразованием) :

(Соотношение между Р и а сделано несколько нерегулярным, чтобы подчеркнуть, что детали здесь совершенно произвольны и полностью определяются тем, кто производит соединение.) Положим далее (это существенно для упорядоченности соединения), что две наши машины Р и R работают по общей временной шкале, так что изменения в них идут шаг в шаг.
Теперь нетрудно видеть, что две наши машины образуют одну новую машину с вполне детерминированным поведением. Так, предположим, что вся система начинает работу, когда R находится в состоянии а, а Р - в состоянии i. Поскольку Р находится в состоянии Z, то в машине R будет осуществляться преобразование R2 (согласно соотношению Z). Это изменит а в b; в то же время i в Р перейдет в k, так что состояния а и i детерминированно перейдут в b и k. Теперь повторяем рассуждение. Поскольку Р находится в состоянии k, то в машине R опять (согласно соотношению Z) будет осуществляться преобразование R2; поэтому b перейдет (при R2) в a, a k перейдет (при Р) в i. Это приведет всю систему в целом в начальное состояние (а, i), после чего система, очевидно, будет двигаться неограниченно долго по этому циклу.
Поведение всей машины станет более очевидным, если мы применим метод ![]() 3/5 и увидим, что состояние целой машины есть просто вектор с двумя составляющими (х,у), где х - одно из состояний a, b, с, d, а у - одно из состояний i, j, k. Таким образом, вся машина имеет двенадцать состояний, а выше было показано, что состояние (a,i) испытывает переходы (a,i)
3/5 и увидим, что состояние целой машины есть просто вектор с двумя составляющими (х,у), где х - одно из состояний a, b, с, d, а у - одно из состояний i, j, k. Таким образом, вся машина имеет двенадцать состояний, а выше было показано, что состояние (a,i) испытывает переходы (a,i) ![]() (b, k)
(b, k) ![]() (a,i)
(a,i) ![]() и т. д.
и т. д.
Упр. 1. Пусть Q - преобразование нашей целой машины с двенадцатью состояниями (х, у); выпишите Q полностью.
Упр. 2. (Продолжение.) Начертите кинематический график Q. Сколько в нем бассейнов?
Упр. 3. Соедините Р и R, используя преобразование У:

Что случится, если машина начнет работу с состояния (а, i)?
Упр. 4. Если две машины соединены в одну систему, то зависит ли поведение всей системы от способа соединения? (Указание: используйте предыдущее упражнение.)
Упр. 5. Если две машины с числом состояний ![]() соединены вместе, то какова максимальная длина переходного процесса, который может возникнуть во всей системе?
соединены вместе, то какова максимальная длина переходного процесса, который может возникнуть во всей системе?
Упр. 6. Если максимальная длина переходного процесса в машине М равна n состояниям, то какова максимальная длина переходного процесса в машине, образованной соединением трех машин М вместе?
Упр. 7. Возьмите много частей (A, В, С,...), каждую с преобразованием
и соедините их в одну длинную цепь.
 и т.д.
и т.д.Пусть в этой цепи часть А действует на В, В - на С и т. д. согласно
Если вход в А имеет значение ![]() , что случится с состояниями дальше по цепи?
, что случится с состояниями дальше по цепи?
Упр. 8. (Продолжение.) Что случится, если вход изменит через один шаг свое значение с ![]() на
на ![]() , а затем вернется опять в
, а затем вернется опять в ![]() , где и останется?
, где и останется?