
12/4. Регулирование ошибками. Общеизвестным примером регулятора, который не может непосредственно реагировать на первоначальное возмущение D, является термостатическая ванна, которая, конечно, не может сказать: <Я вижу, что кто-то приближается ко мне с холодной фляжкой, которую он собирается. погрузить в меня, и потому я должна действовать немедленно>.
Напротив, этот регулятор получает информацию о воздействии только тогда, когда температура воды (Е) фактически начинает падать. То же самое ограничение относится к другим возможным воздействиям, таким как приближение солнечных лучей, которые будут согревать воду, или открывание двери, откуда дует холодный воздух.
Это ограничение имеет место для многих важных типов регулятора. Сюда относится, например, механизм поддержания постоянного кислородного питания тканей: любая продолжительная нехватка кислорода вызывает в конце концов увеличение числа красных кровяных шариков. Поэтому у людей с определенными сердечными заболеваниями и у людей, живущих на большой высоте, где воздух разрежен, наблюдается постоянная тенденция к такому увеличению. Это регулирование получает информацию от самого вредного воздействия (отсутствия кислорода), а не от причины (D) сердечного заболевания или от решения жить на большой высоте.
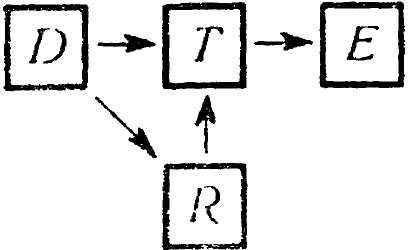
С точки зрения теории связи легко соотнести эти новые явления с уже известными. Различие здесь состоит просто в том, что теперь информация от D к R (которая должна передаваться, если регулятор R вообще должен играть какую-то полезную роль) проходит через Т.
Вместо
 |
мы теперь имеем |
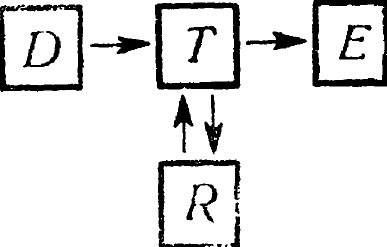 |
Таким образом, R получает информацию о D через посредство Т:
D |
|
T |
|
R |
и информацией, пригодной для использования в целях регулирования, будет та, которая сохранится при кодировании, обусловленном прохождением через Т (![]() 8/5).
8/5).
Иногда информация, поступающая в R, должна проходить еще более длинный путь, так что R испытывает влияние только осуществившегося уже воздействия на Е.
Диаграмма непосредственных воздействий в этом случае будет иметь вид
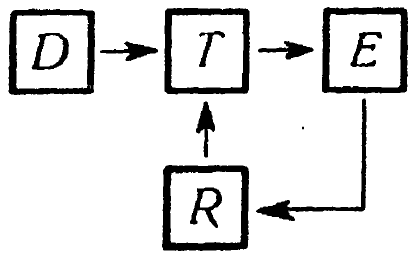
а это - не что иное, как основная форма простой <следящей системы, управляемой ошибками>, или <регулятора с замкнутой петлей>, с ее общеизвестной обратной связью от Е к R Читатель должен понимать, что эта форма отличается от описанной в основной формулировке (![]() 11/4) только тем, что здесь информация о D приходит в R более длинным путем:
11/4) только тем, что здесь информация о D приходит в R более длинным путем:
D |
|
T |
|
E |
|
R |
|
Также и здесь информацией, пригодной для использования в R, будет только та, которая сохраняется при передаче через Т и Е.
Эта форма имеет величайшее значение и широчайшее применение. Дальнейшая часть книги будет посвящена ее рассмотрению. (Остальные случаи существенно просты и не нуждаются в особом рассмотрении.)