
12/10. Тесная связь, существующая между марковской и детерминированной машинами, проявляется также и в существовании промежуточных форм. Так, предположим, что крыса частично изучила лабиринт из девяти клеток, показанный на рис. 12/10/1, где G является
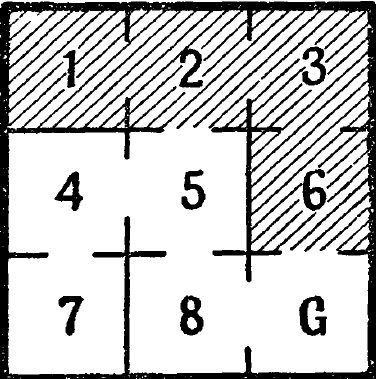
Рис. 12/10/1.
целью. По причинам, в подробном изложении которых нет необходимости, крыса не находит никаких чувственно воспринимаемых ориентиров в клетках 1, 2, 3 и 6 (заштрихованных), так что, находясь в одной из этих клеток, она переходит наугад в любую из тех клеток, в которые она имеет доступ. Например, если мы будем повторно сажать ее в клетку 3, то она с одинаковой вероятностью будет переходить в 2 или 6. (Равную вероятность я принимаю только для удобства.) Однако в клетках 4, 5, 7, 8 и G крыса имеет чувственно воспринимаемые ориентиры и движется прямо из клетки в клетку по направлению к G. Например, если сажать ее повторно в клетку 5, то она всегда будет переходить в 8 и оттуда в G. Такое поведение не является исключением в биологической работе.
Нетрудно найти матрицу ее переходов. Так, из 1 она может перейти только в 2 (в силу устройства лабиринта). Из 2 она переходит с одинаковой вероятностью в 1, 3 или 5. Из 4 она переходит только в 5. Из G она может перейти только в G. Так и строится эта матрица.
Упр. Постройте какую-нибудь возможную матрицу переходных вероятностей описанной системы.